Enable time sharing
Follow the instructions in the previous section, you are able to create kernel threads. In order to run them, we must support thread shceduling -- it enables a thread to yield the CPU to another one. Again, let's begin from the simplest step: support thread scheduling on a non-preemptive CPU (which means every thread will not be interrupted. It continues running until it yields explicitly by calling schedule()). Therefore, we need to support following APIs:
/// Get the current running thread
pub fn current() -> Arc<Thread> { ... }
/// Yield the control to another thread (if there's another one ready to run).
pub fn schedule() { ... }
/// Gracefully shut down the current thread, and schedule another one.
pub fn exit() -> ! { ... }
Schedule trait is designed to support the schedule process. In this part, we will also write a FIFO scheduler that implements the Schedule trait. Understand it may be helpful to your project!
States of a kernel thread
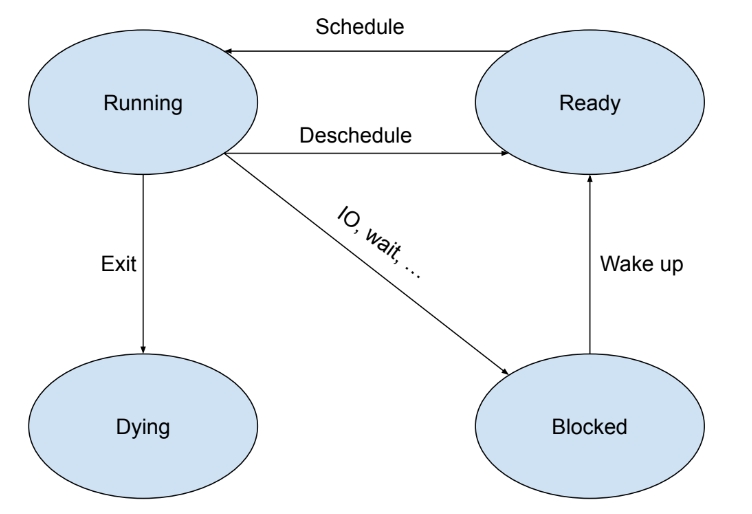
Now consider there are multiple threads inside the kernel. Those threads are in different states. At a given time, a thread can be in one of four states: Running, Ready, Blocked and Dying. Running simply means the thread is running (As the OS is running on a single-core processor, there is only one Running thread at any given time). A thread in Ready state is ready to be scheduled. Blocked threads are blocked for different reasons(e.g. IO, wait for another thread to terminate, etc. It is complex, so we are not covering it in this section). Dying is a little bit tricky, we label a thread as Dying to release its resources in the (hopefully near) future. The state transitions are illustrated in the following graph.
Those states can be found in:
File: src/thread/imp.rs
#![allow(unused)] fn main() { /// States of a thread's life cycle #[derive(Debug, Clone, Copy, PartialEq, Eq)] pub enum Status { /// Not running but ready to run Ready, /// Currently running Running, /// Waiting for an event to trigger Blocked, /// About to be destroyed Dying, } }
And a Thread struct contains a status field. It is also inside a Mutex beacuse it is mutable.
File: src/thread/imp.rs
#[repr(C)]
pub struct Thread {
tid: isize,
name: &'static str,
stack: usize,
status: Mutex<Status>,
context: Mutex<Context>,
...
}
impl Thread {
...
pub fn status(&self) -> Status {
*self.status.lock()
}
pub fn set_status(&self, status: Status) {
*self.status.lock() = status;
}
...
}
Support the current function
Because at any given time, only one thread could be in Running state. Therefore, the easiest way is to record it in the Manager struct. The current function could thus be implemented:
File: src/thread/manager.rs
/// Global thread manager, contains a scheduler and a current thread.
pub struct Manager {
/// The current running thread
pub current: Mutex<Arc<Thread>>,
/// All alive and not yet destroyed threads
all: Mutex<VecDeque<Arc<Thread>>>,
}
File: src/thread.rs
/// Get the current running thread
pub fn current() -> Arc<Thread> {
Manager::get().current.lock().clone()
}
The Schedule trait and the FIFO Scheduler
When a thread yields, the OS is responsible to select another ready thread and schedule it. Many algorithms can achieve this. Therefore, we designed the Schedule trait to standardize it.
File: src/thread/scheduler.rs
/// Basic thread scheduler functionalities.
pub trait Schedule: Default {
/// Notify the scheduler that a thread is able to run. Then, this thread
/// becomes a candidate of [`schedule`](Schedule::schedule).
fn register(&mut self, thread: Arc<Thread>);
/// Choose the next thread to run. `None` if scheduler decides to keep running
/// the current thread.
fn schedule(&mut self) -> Option<Arc<Thread>>;
}
The Schedule trait looks nice, but how to use it? In fact, we added a new field, scheduler in the Manager struct, who will use scheduler to select from the thread candidates, and record the ready threads. For example, when a new thread is created, its default state is Ready. So the Manager will call scheduler to register it into the scheduler.
File: src/thread/manager.rs
/// Global thread manager, contains a scheduler and a current thread.
pub struct Manager {
/// Global thread scheduler
pub scheduler: Mutex<Scheduler>,
/// The current running thread
pub current: Mutex<Arc<Thread>>,
/// All alive and not yet destroyed threads
all: Mutex<VecDeque<Arc<Thread>>>,
}
impl Manager {
/// Get the singleton.
pub fn get() -> &'static Self { ... }
pub fn register(&self, thread: Arc<Thread>) {
// Register it into the scheduler
self.scheduler.lock().register(thread.clone());
// Store it in all list.
self.all.lock().push_back(thread.clone());
}
}
Implement a scheduler is easy (at least for FIFO scheduler):
// File: src/thread/scheduler/fcfs.rs
/// FIFO scheduler.
#[derive(Default)]
pub struct Fcfs(VecDeque<Arc<Thread>>);
impl Schedule for Fcfs {
fn register(&mut self, thread: Arc<Thread>) {
self.0.push_front(thread)
}
fn schedule(&mut self) -> Option<Arc<Thread>> {
self.0.pop_back()
}
}
To use the FIFO scheduler, we need to create a type alias:
// File: src/thread/scheduler.rs
pub type Scheduler = self::fcfs::Fcfs;
The Schedule trait allows us to separate the logic of context switching and selecting candidate execution threads. Manager only uses Schedule trait, if you want to use another scheduler, all you need to do is to create another struct, implement Schedule trait, and set the type as Scheduler. Isn't it exciting?
Support schedule function based on Schedule trait
Now we are writing the schedule function. Suppose there are two kernel threads, T1 and T2. T1 calls schedule(), and the scheduler choose T2 to run. Basically, schedule must:
- store callee-saved register values on T1's context (we needn't store caller saved values, because they have already saved in stack frame)
- load T2'2 register values from T2's context (including load T2's sp)
- transfer control to T2's PC
- update information in
Manager
Following graph shows the sp before & after the schedule.
Before schedule After schedule
┌──────────────┐ ┌──────────────┐
│ ... │ │ ... │
├──────────────┤ ├──────────────┤
sp-> │ T1's stack │ │ T1's stack │
├──────────────┤ ├──────────────┤
│ ... │ │ ... │
├──────────────┤ ├──────────────┤
│ T2's stack │ sp->│ T2's stack │
├──────────────┤ ├──────────────┤
│ ... │ │ ... │
└──────────────┘ └──────────────┘
We divided the schedule function into 3 steps:
- Use scheduler to find another runnable thread
- Do context switching
- Do some finishing touches, like register the previous thread to the scheduler, ...
The first and third step needs to modify the Manager or the Scheduler, therefore they are implemented as a method of Manager. The second step has to be written in assembly. Let's start from the first step:
// File: src/thread/manager.rs
impl Manager {
...
pub fn schedule(&self) {
let next = self.scheduler.lock().schedule();
if let Some(next) = next {
assert_eq!(next.status(), Status::Ready);
next.set_status(Status::Running);
// Update the current thread to the next running thread
let previous = mem::replace(self.current.lock().deref_mut(), next);
// Retrieve the raw pointers of two threads' context
let old_ctx = previous.context();
let new_ctx = self.current.lock().context();
// WARNING: This function call may not return, so don't expect any value to be dropped.
unsafe { switch::switch(Arc::into_raw(previous).cast(), old_ctx, new_ctx) }
// Back to this location (which `ra` points to), indicating that another thread
// has yielded its control or simply exited. Also, it means now the running
// thread has been shceudled for more than one time, otherwise it would return
// to `kernel_thread_entry` (See `create` where the initial context is set).
}
}
}
The first step is done in Manager::schedule function. We first find another runnable thread. If success, we marked it as Running, put it inside the current field, and then call switch to do context switching. The switch function takes 3 arguments: an pointer to the previous thread, and the old_ctx and new_ctx. old_ctx and new_ctx are preserved context in previous and current Thread struct.
The next step is in the switch funtion. switch is written in riscv asm, and we prepared a signiture for it in rust extern "C", in order to force it to stick to the C calling convention (a0~a7 are arguments, ...):
File: src/thread/switch.rs
#[allow(improper_ctypes)]
extern "C" {
/// Save current registers in old. Load from new.
///
/// The first argument is not used in this function, but it
/// will be forwarded to [`schedule_tail_wrapper`].
pub fn switch(previous: *const Thread, old: *mut Context, new: *mut Context);
}
global_asm! {r#"
.section .text
.globl switch
switch:
sd ra, 0x0(a1)
ld ra, 0x0(a2)
sd sp, 0x8(a1)
ld sp, 0x8(a2)
sd s0, 0x10(a1)
ld s0, 0x10(a2)
sd s1, 0x18(a1)
ld s1, 0x18(a2)
sd s2, 0x20(a1)
ld s2, 0x20(a2)
sd s3, 0x28(a1)
ld s3, 0x28(a2)
sd s4, 0x30(a1)
ld s4, 0x30(a2)
sd s5, 0x38(a1)
ld s5, 0x38(a2)
sd s6, 0x40(a1)
ld s6, 0x40(a2)
sd s7, 0x48(a1)
ld s7, 0x48(a2)
sd s8, 0x50(a1)
ld s8, 0x50(a2)
sd s9, 0x58(a1)
ld s9, 0x58(a2)
sd s10, 0x60(a1)
ld s10, 0x60(a2)
sd s11, 0x68(a1)
ld s11, 0x68(a2)
j schedule_tail_wrapper
"#}
/// A thin wrapper over [`thread::Manager::schedule_tail`]
///
/// Note: Stack is not properly built in [`switch`]. Therefore,
/// this function should never be inlined.
#[no_mangle]
#[inline(never)]
extern "C" fn schedule_tail_wrapper(previous: *const Thread) {
Manager::get().schedule_tail(unsafe { Arc::from_raw(previous) });
}
old is the previous thread's context, we will write to it; new is the next thread's context, we will read from it. The switch function changes the runtime stack. Then we jump to the schedule_tail_wrapper, where we call the Manager::schedule_tail, finish the schedule procedure:
File: src/thread/manager.rs
impl Manager {
/// Note: This function is running on the stack of the new thread.
pub fn schedule_tail(&self, previous: Arc<Thread>) {
match previous.status() {
Status::Dying => {
// A thread's resources should be released at this point
self.all.lock().retain(|t| t.id() != previous.id());
}
Status::Running => {
previous.set_status(Status::Ready);
self.scheduler.lock().register(previous);
}
Status::Blocked => {}
Status::Ready => unreachable!(),
}
}
}
We will do different work, depending on the status of the previous thread. Let's focus on the Running and Ready cases (we will come back to Dying when discuss the exit funtion, and discuss Blocked in further future). The previous thread's status is Ready is a unreachable case, beacuse it is read from the current field in the Manager, so it should not be ready. Previous thread's status is Running indicates it yields the CPU, then we shall put it back into the scheduler.
After schedule_tail finishes, we have already done everything needed to switch to another thread. Then schedule_tail should return to schedule_tail_wrapper, which should return to somewhere in the new thread, and continues to execute it. It actually does so, because we have already modified the ra register in switch (MAGIC!).
Exercise
In fact,
schedule_tail_wrapperonly returns to two places. Could you find them?
With three functions introduced above, the schedule funtion could be implemented in this way:
File: src/thread.rs
/// Yield the control to another thread (if there's another one ready to run).
pub fn schedule() {
Manager::get().schedule()
}
Support exit function
In schedule_tail, the status matches Dying means the previous function is exited. Therefore, in the exit function, all we need to do is to set the status to Dying, and then schedule another funtion.
File: src/thread.rs
/// Gracefully shut down the current thread, and schedule another one.
pub fn exit() -> ! {
{
let current = Manager::get().current.lock();
current.set_status(Status::Dying);
}
schedule();
unreachable!("An exited thread shouldn't be scheduled again");
}
Exercise
Why do we need another block before calling
schedule? If we delete the "{" and "}" inside the function, what will happen?